作者:熊海明
(赤湾集装箱码头有限公司,广东深圳518000)
摘要:为满足集装箱港口 RTG远程控制系统的技术要求,采用格雷母线技术、编玛器多点校验控制、位置偏差补偿等控制技术对RTG自动定位系统进行改造,提升RTG自动定位精度以及远程操控的安全性和操作效率。
关键词:港口;RTG;远程控制系统;自动定位
RTG Auto Positioning System Modification
XIONG Haiming
(Chiwan Container Terminal Co., Ltd., Shenzhen 518000, Guangdong, China)
Abstract: The RTG auto positioning system is modified with the technologies of Graybus, encoder multi-point calibration control and position deviation compensation tomeet the requirements of RTG remote control system in the container terminal.Meanwhile, the RTG auto positioning accuracy, remote operation safety and efficiencyare improved.
Key words: port; RTG; remote control system; auto positioning
RTG远程控制改造是传统集装箱港口自动化改造的核心环节,需要实现在远程操作室内完成人与设备多对多自动作业模式的升级改造。根据RTG远程控制改造的技术要求,RTG需在接受CTOS操作系统作业指令后完成三大机构的自动行走和对位,操作司机只需手动完成简单的对箱和开闭锁吊柜作业。RTG稳定可靠的自动定位精度将直接影响RTG远控操作的安全性和高效性,因此自动定位系统的开发和改造成为RTG远程控制的核心。
1 RTG自动定位方案的选择
港口设备可选用的自动定位技术比较多,包括GPS技术、磁尺磁钉技术、雷达定位技术、红外传感器定位技术及RFID定位技术等,但这些定位技术存在定位精度不可靠、安装方式复杂或者易受周边环境、设备干扰影响等缺点。通过实践及论证,本文开发基于格雷母线技术、编码器多点校验和位置偏差补偿等技术的自动定位系统。
2 RTG自动定位系统的开发与运用2.1大车定位方案采用格雷母线定位技术,定位精度可达∓20 mm
2.1.1格雷母线原理
格雷母线定位技术是采用电磁感应原理和格雷码的编码原理来进行位置检测的,是1种连续的非接触式绝对位置检测方式。格雷母线位置检
测传感器通过安装在RTG受电弓上的感应天线与沿跑道方向安装的格雷母线之间的相互感应来检测天线位于格雷母线长度方向上的绝对位置,相当于在油改电的滑线架上架设1把有刻度的标尺,能实时反映大车的实际位置。其系统的构成包括格雷母线、地址编码器、天线箱和地址解码器等4大组成部分。
2.1.2格雷母线的安装
格雷母线的现场安装充分考虑堆场油改电时架设的低架滑触线和受电弓的设计、尺寸,把格雷母线安装在滑触线支架上方居中位置,可保证双侧多台RTG共用1条格雷母线进行位置定位。格雷母线与天线箱安装方式示意图见图1.
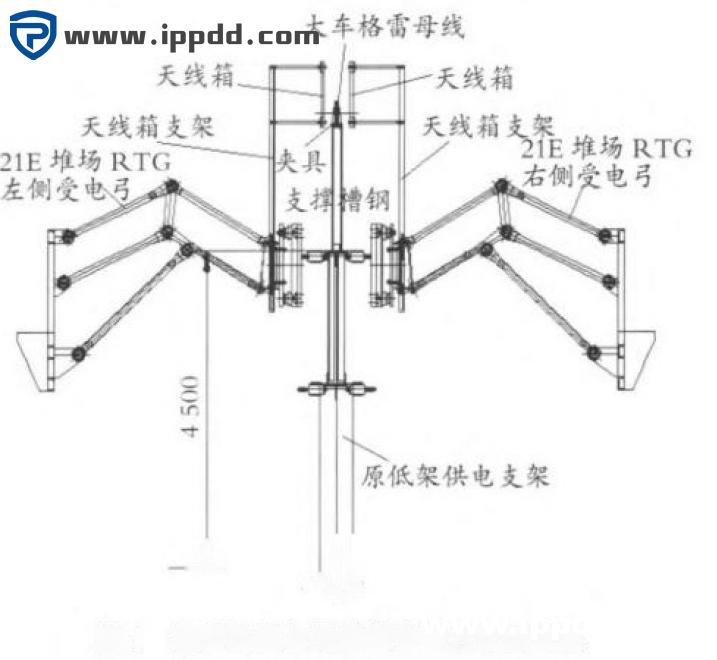
–1 M
图1格雷母线与天线箱安装方式示意图
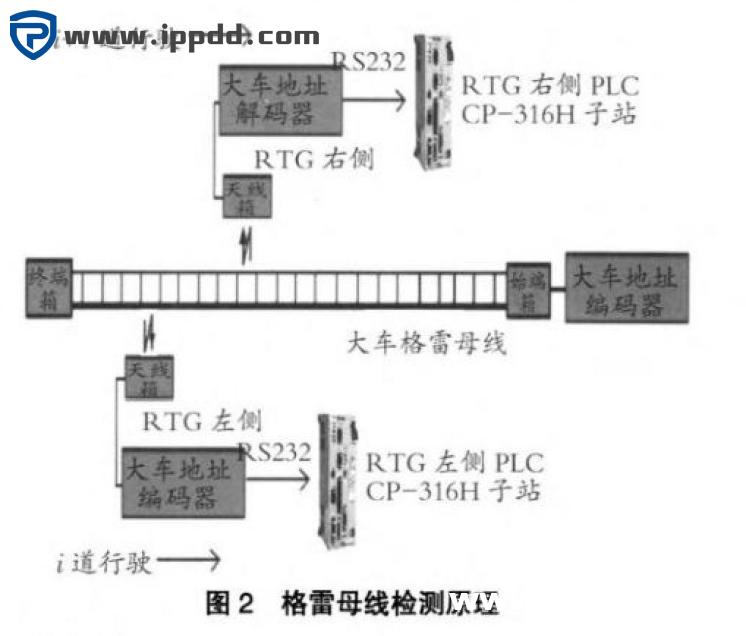
2.1.3格雷母线与场桥PLC之间的数据接口
格雷母线检测原理见图2。格雷母线检测出大车在不同车道时的实时位置定位信号,完成两侧位置信息的采集和解码,并通过左右两侧RS232上传至车载电气系统安川PLC子站,由PLC将大车绝对位置集成到远程控制系统中。格雷母线串行数据内容包括故障功能码、循环计数码及地址信息等。
2.1.4大车格雷母线位置信号的运用
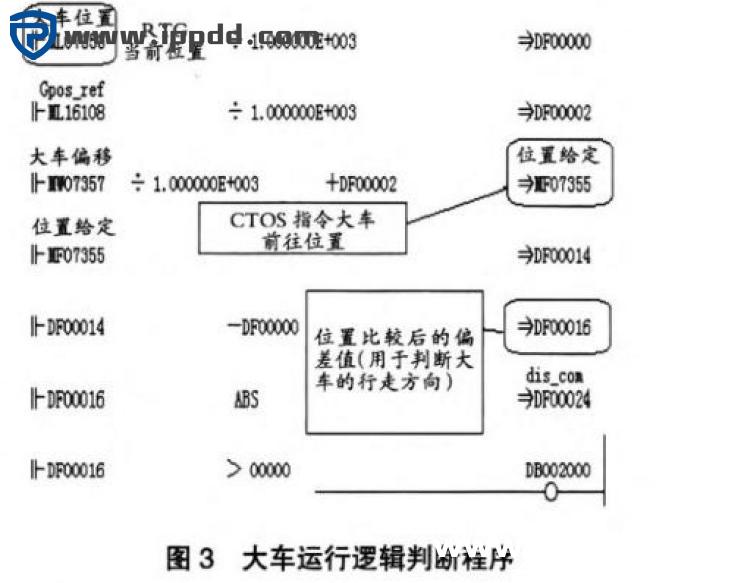
2.1.4.1大车行走逻辑判断
与CTOS发送的作业指令位置信息进行比对,进行大车自动行走的逻辑判断°大车运行逻辑判断程序见图30
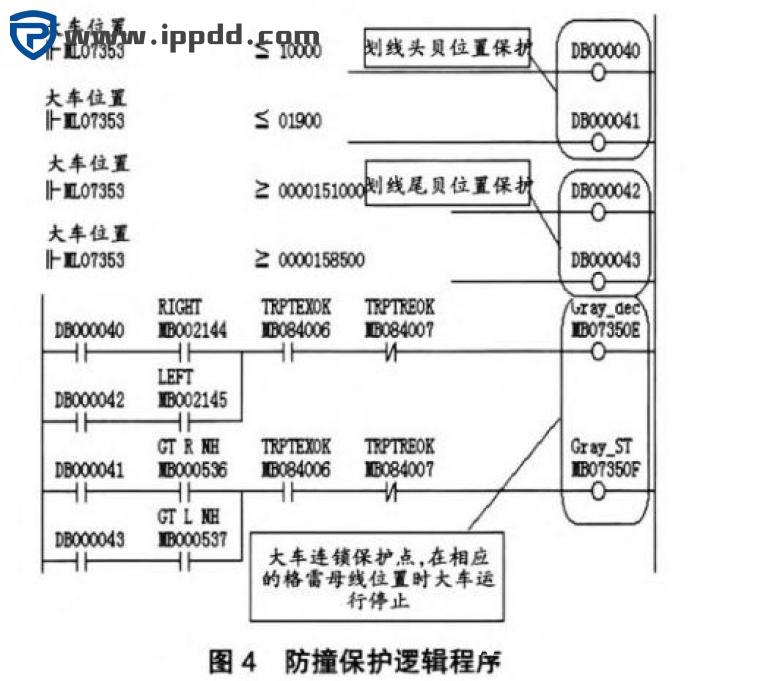
2.1.4.2大车(受电弓)的防撞保护
运用格雷母线数据判断堆场头尾贝位的保护位置。防撞保护逻辑程序见图4。
2.1.5格雷母线定位精度测试结果
2.1.5.1精度测试
以皮尺测量的每次行走距离为基准,通过计算皮尺测量的每次行走距离与格雷母线每次行走
距离的差值,即可得到格雷母线每次行走的精度。格雷母线行走80 m的精度测试结果见表1。
表1格雷毋线行走80 m的精度测试结果 m
| 行走
序号 |
格雷母
线读数 |
格雷母线每次行走距离 | 皮尺
读数 |
皮尺测量的每次行走距离 | 皮尺测量的每次行走距离与格雷母线行走距离的差值 |
| 0 | 3.134 | 4.05 | |||
| 1 | 19.27 | 16.136 | 20.215 | 16.165 | 0.029 |
| 2 | 35.626 | 16.356 | 36.58 | 16.365 | 0.009 |
| 3 | 51.948 | 16.322 | 52.895 | 16.315 | -0.007 |
| 4 | 67.988 | 16.04 | 68.888 | 15.993 | -0.047 |
2.1.5.2重复度测试
重复度测试是在堆场里选择1个固定的贝位,RTG多次跑到该贝位时所测量的格雷母线数值与实际测量的皮尺数值的偏差。
2.2起升/小车定位
起升/小车定位采用脉冲编码器进行定位。为了减少在作业过程中出现叠加误差和脉冲丢失等故障,在程序中设置多点校验功能,保证起升/小车的定位精度在± 50 mm以内。
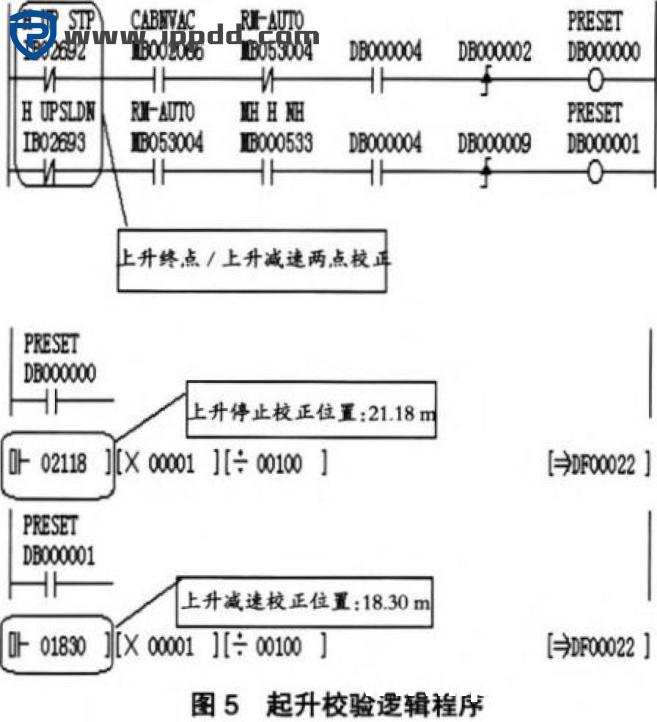
2.2.1起升定位设定
设定上升减速/上升停止两凸轮限位信号点作为编码器的校正位置。起升校验逻辑程序见图5.
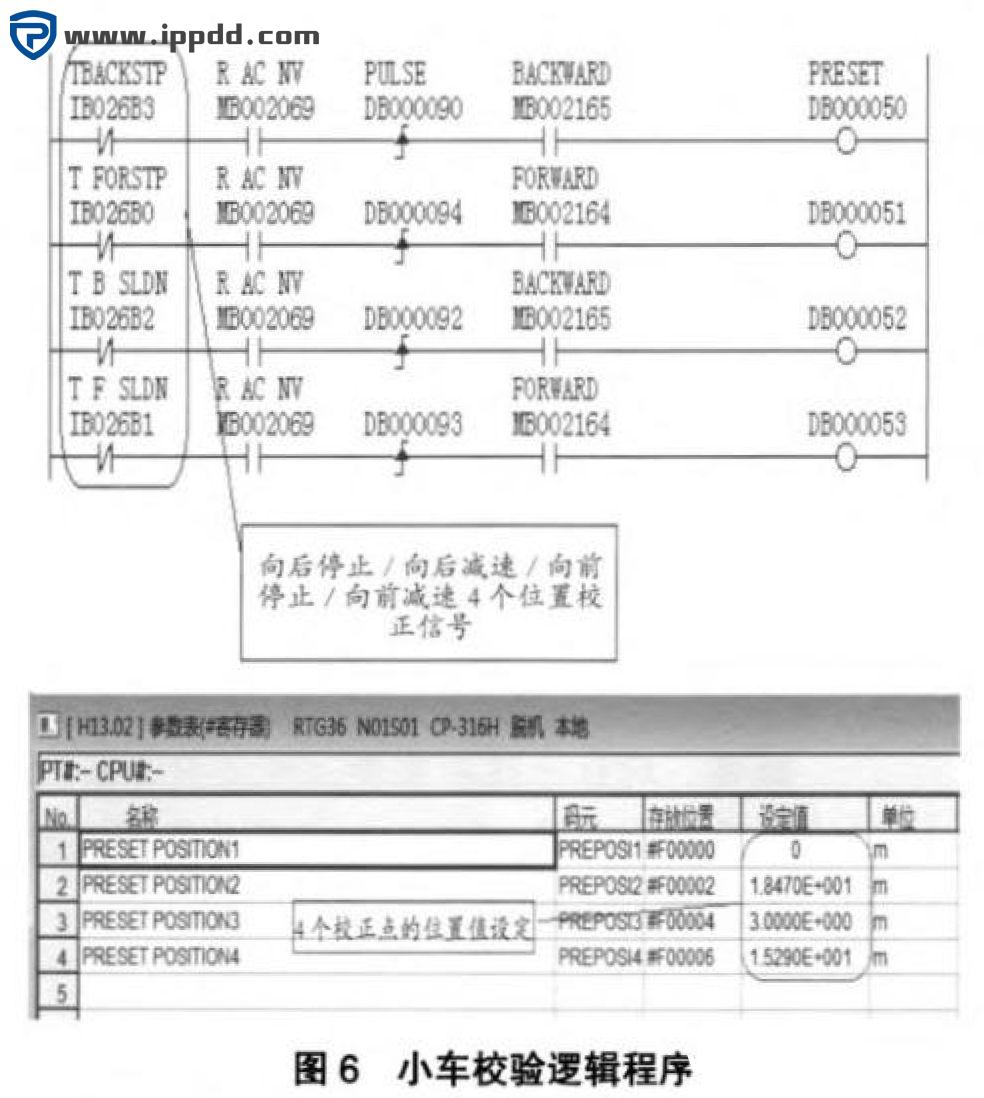
2.2.2小车定位设定
设定向前减速/向前停止/向后减速/向后停止等4个限位信号点作为编码器的校正位置。小车校验逻辑程序见图6。
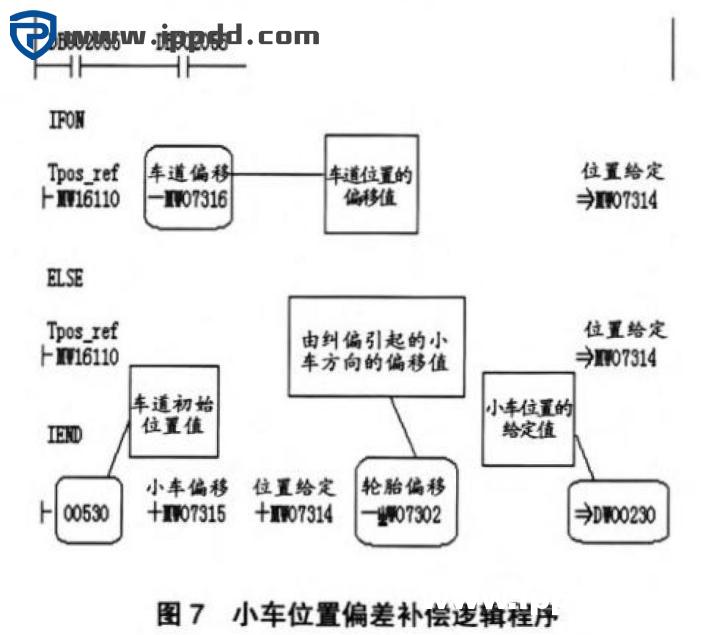
2.2.3小车定位位置偏差补偿
为了减少RTG在自动运行过程中出现的位置偏差影响小车的定位精度,在程序中计算和设置位置偏差补偿的校准,保证小车的定位准确。小车位置偏差补偿逻辑程序见图7。小车自动定位的位置给定值=CTOS位置给定值+场地车道位置的偏移+大车纠偏偏移值。
3结语
目前,赤湾集装箱码头所应用的RTG自动定位系统综合考虑码头堆场及设备的使用现状,系统的实施具有硬件结构简单、安装施工便捷及硬件成本费用低等优点,可为RTG远程自动控制的实施打下坚实的基础。
