文章导读 || 田立勇, 唐瑞, 于宁, 等.
关键词:带式输送机;不停机更换托辊;皮带举升机构;仿真分析
TIAN Liyong, TANG Rui, YU Ning, et al. Design and application of belt lifting mechanism for replacing idler of belt conveyor[J]. Chinese Journal of Engineering Design, 2023, 30(6): 667-677.
辽宁工程技术大学 机械工程学院,辽宁 阜新 123000
2)利用SolidWorks Motion模块对皮带举升机构进行了运动学仿真分析,得到了中间托辊架和剪叉臂的运动曲线。结果表明,中间托辊架的举升高度最高可达240 mm;剪叉臂的最大角速度为35 (°)/s,最大角加速度为127 (°)/s2;皮带举升机构的速度在升降过程中未发生突变,说明其运动过程无干涉状况,验证了机构设计的合理性和可行性。
3)采用ANSYS Workbench有限元软件对皮带举升机构进行了静力学仿真分析。结果表明,机构的最大变形量为1.209 7 mm,可忽略变形量对机构的影响;机构的最大等效应力出现在剪叉臂与托辊架的连接处,为142.8 MPa,小于材料的屈服强度,说明机构的刚度和强度均符合设计要求。
4)通过地面试验对皮带举升机构在20~60 kN载荷条件下的承载能力进行了测试。结果表明,机构具有足够的承载能力。分别在带式输送机停机和工作状态下开展了井下试验,结果表明,皮带的最大举升高度为241 mm,达到预期效果,可满足更换托辊机器人的功能需求,验证了皮带举升机构能实现在带式输送机不停机状态下举升皮带并保证输送机稳定运行。
剪叉式皮带举升机构的成功应用是不停机更换托辊机器人的关键技术突破,减少了带式输送机运行故障,有利于保障煤炭生产的连续性和提高煤炭生产效率。此外,本文采用理论分析与仿真相结合的方式开展研究,有效地降低了研发成本和周期;所设计的皮带举升机构结构紧凑,举升能力强,伸展性好,适用于小空间、大高度的举升环境,可为其他设备举升机构的设计与应用提供参考。

图1 更换托辊机器人结构组成
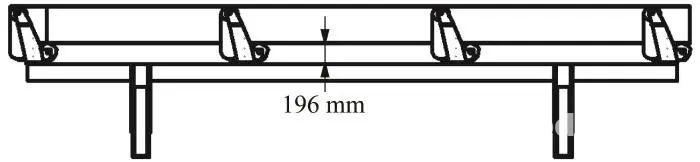
图2 带式输送机结构示意
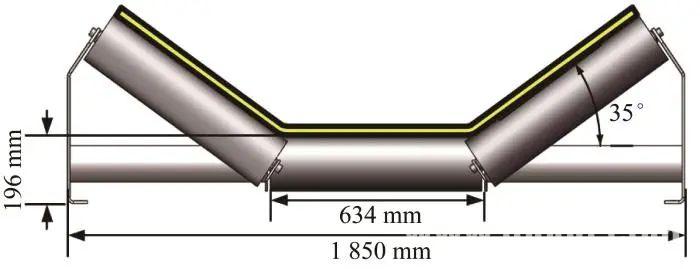
图3 槽形托辊组结构示意
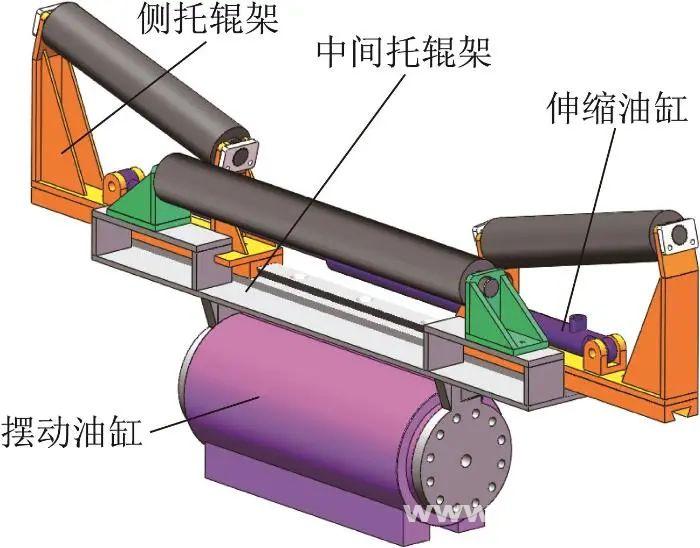
图4 摆动式皮带举升机构三维模型
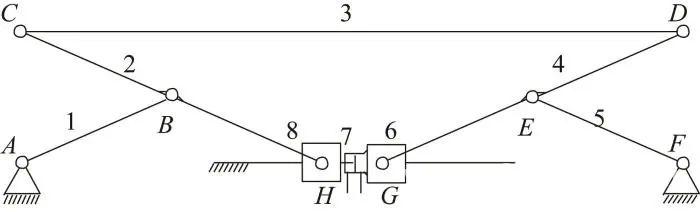
1,2,4,5—剪叉臂;3—托辊架;6,8—油缸滑块;7—举升油缸。
图5 剪叉式皮带举升机构结构简图
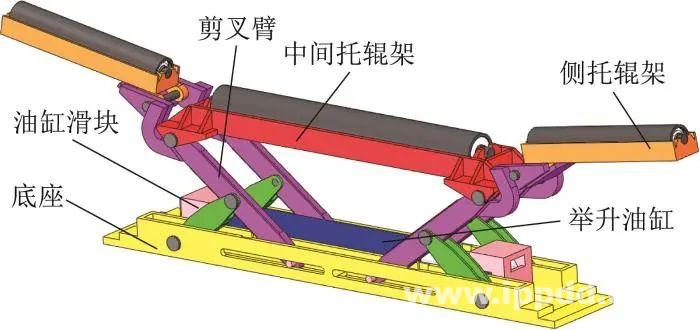
图6 剪叉式皮带举升机构三维模型
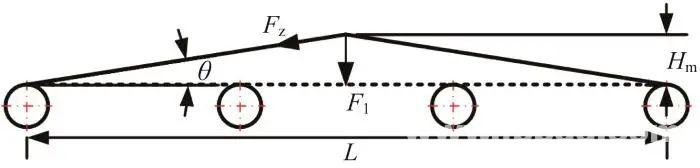
图7 皮带张紧力分析
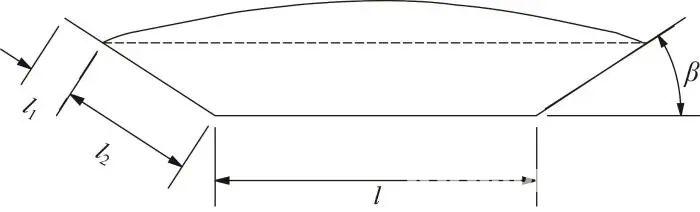
图8 带式输送机上物料截面形状示意
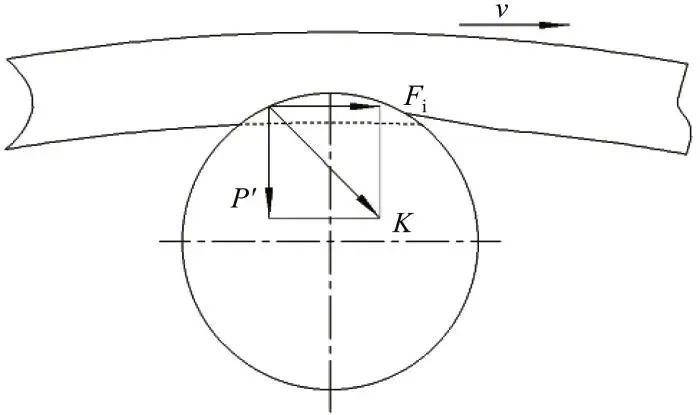
图9 托辊受力分析
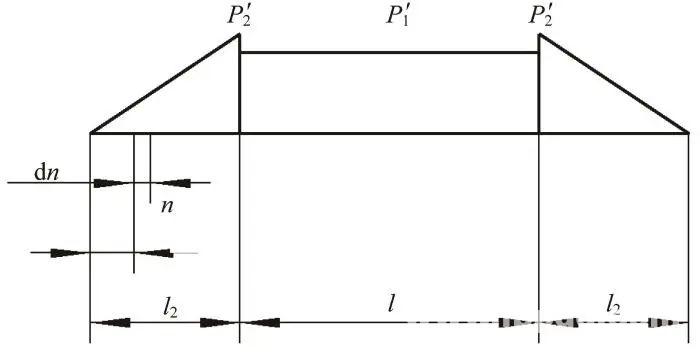
图10 托辊表面压力分布
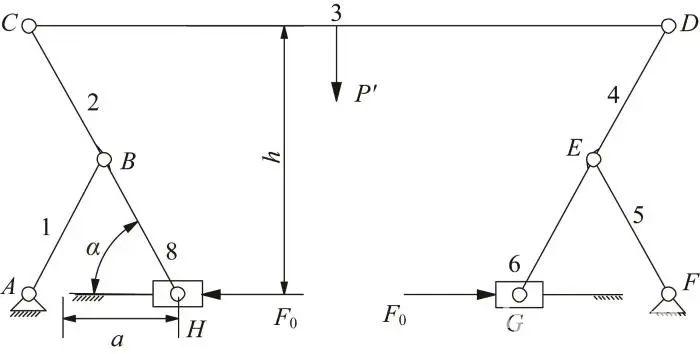
图11 剪叉式皮带举升机构举升状态示意
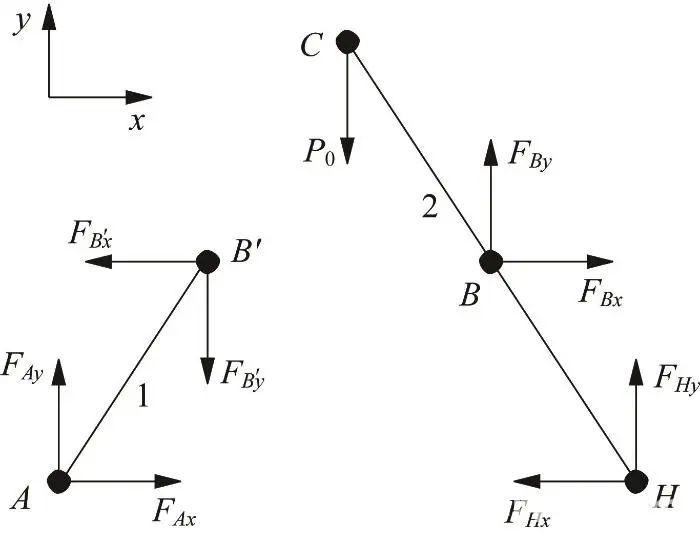
图12 剪叉臂受力分析
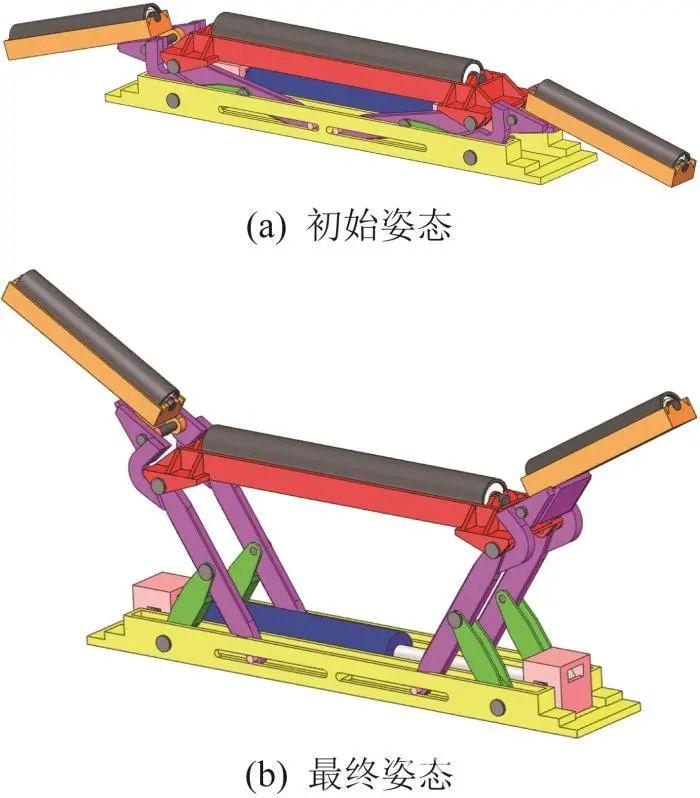
图13 剪叉式皮带举升机构的初始和最终姿态
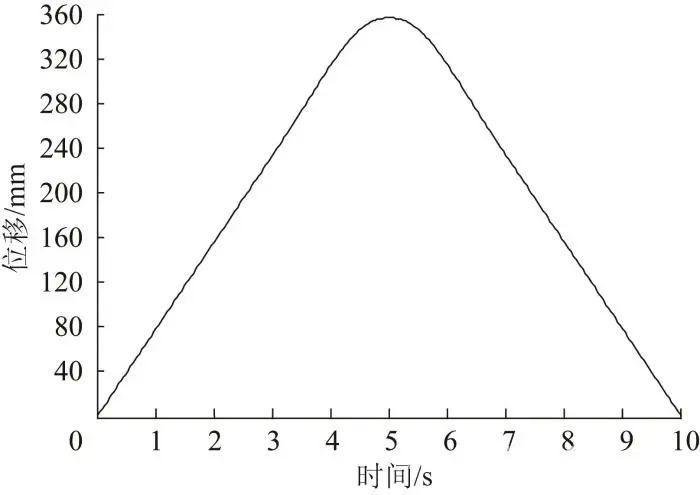
图14 举升油缸运动曲线
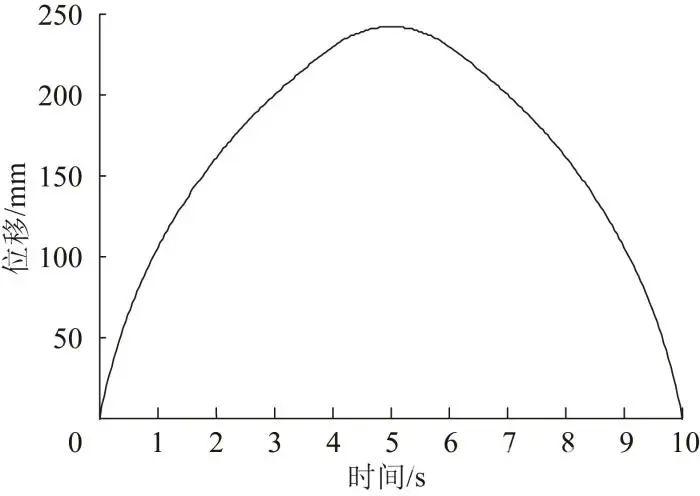
图15 中间托辊架的竖直位移曲线
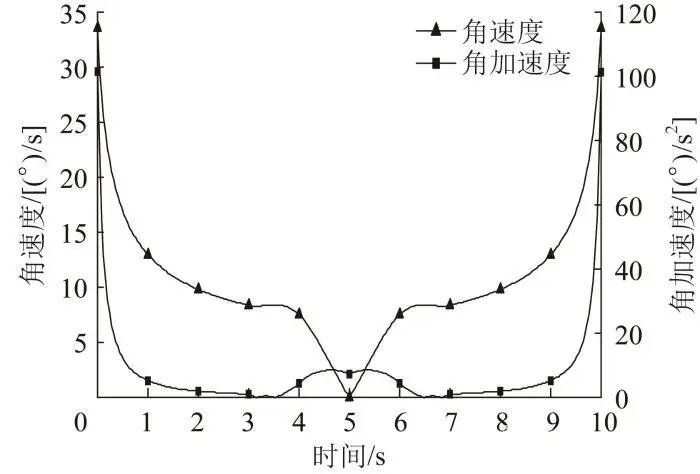
图16 剪叉臂的角速度和角加速度曲线
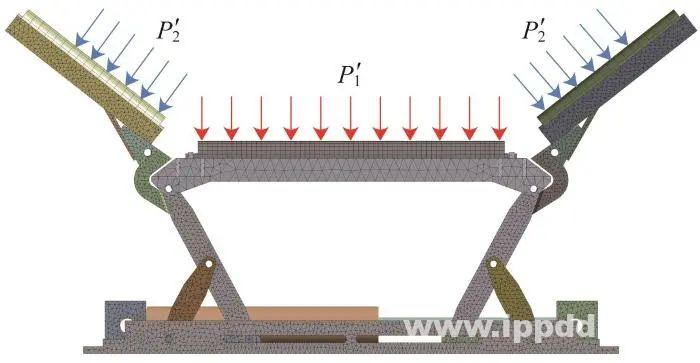
图17 剪叉式皮带举升机构有限元网格模型

图18 剪叉式皮带举升机构等效应力云图

图19 剪叉式皮带举升机构变形云图

图20 皮带举升机构地面试验现场
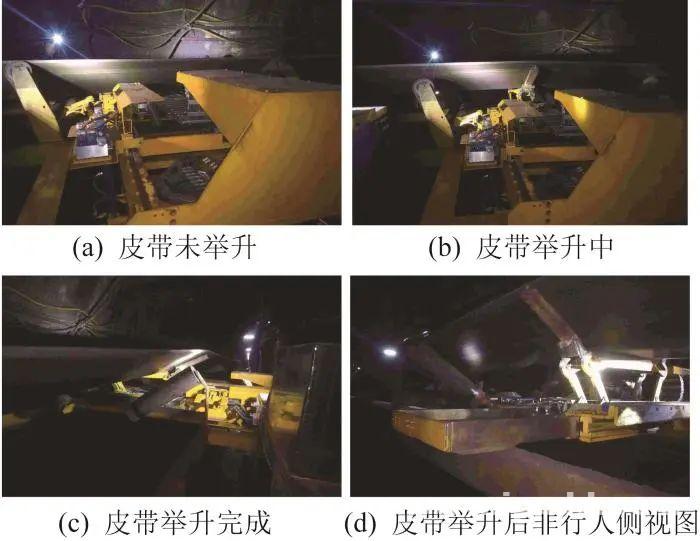
图21 停机状态下井下试验现场
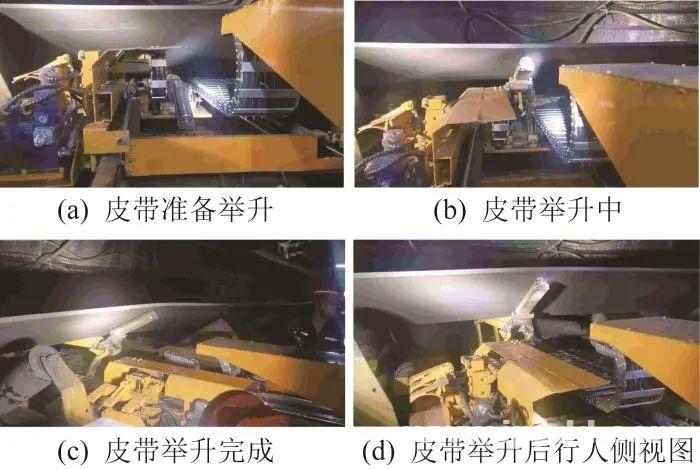
图22 工作状态下井下试验现场

图23 皮带举升高度测量现场
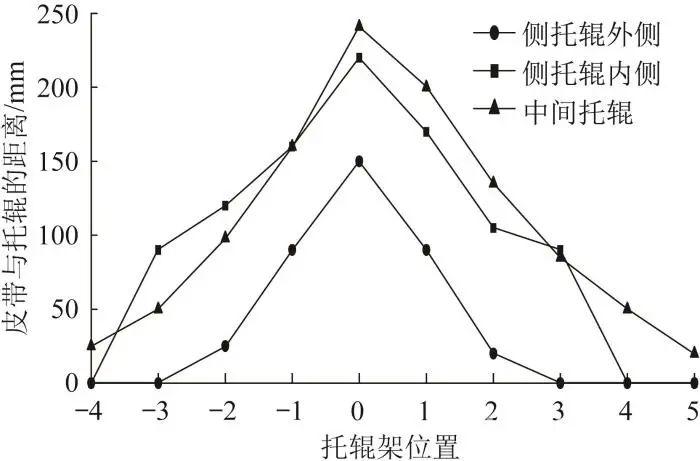
图24 皮带举升高度变化曲线

