许海翔 张 烨 吴峰崎 龚 文
上海市特种设备监督检验技术研究院 上海 200062
摘 要:在起重机参数测量中,因受现场条件的限制,准确度无法控制。文中提出了一种履带式起重机幅度现场测量方法,先采用全站仪测量相关标记点,然后运用平面拟合和空间解析几何方法确定回转轴位置,最终求得该工况幅值。该方法避免了直接确定起重机回转中心位置的困难,可为现场检验提供可靠的数据支持。
关键词:平面拟合;全站仪;幅度测量
中图分类号:TH213.7 文献标识码:A 文章编号:1001-0785(2020)18-0086-04
0 引言
全站仪和经纬仪已成为起重机参数测量中经常选用的仪器,很多学者在起重机轨道测量中使用这些仪器进行了有意义的研究工作[1-5]。Giuseppe Ganci 等[1] 使用3个全站仪对300 m 长起重机大车轨道进行交会测量,结合三角测量与距离测量方法对轨道上均匀分布的标记点测量坐标数据,得到各轨道的平均水平线位置、各位置的平均高度、与标准轨距的横向偏差以及两条轨道的同截面高差,同时用 CAD 软件绘制轨距图和高度偏差图。该测量方法精度可达1 mm,但测量方法较复杂并使用了3 台全站仪。为解决起重机轨道磨损、钢轨接头状况等关键参数的监测问题,Dennig D 等[2] 开发了一套轨道综合检测系统,包括监控小车和外部跟踪传感器,可进行运动学参数观测,该系统具有测量精度高、测量参数全面等优点,但结构复杂成本高,对现场也有较高要求,故难以推广和应用。
尽管有很多关于起重机参数测量研究的文献,但其中对起重机幅度测量的文献相对较少。臂架型起重机幅度是决定其安全运行的重要参数,由于幅度的偏差造成起重力矩限制器不能在起重力矩达到临界值时及时动作而导致整机倾覆事故时有发生。TSG 7015—2016《起重机械定期检验规则》[6] 及TSG 7016—2016《起重机械安装改造重大修理监督检验规则》[7] ( 以下简称检规) 都规定了臂架类起重机的大型监控系统中幅度综合误差检验要求。本文采用全站仪对履带式起重机进行标记点测量,并用Matlab 软件对测量数据进行计算从而得到某工况下幅值,该方法现场操作简单、准确可靠。
1 起重机幅度定义及检验要求
GB 6974.1—2008《起重机术语 第1 部分:通用术语》中幅度的定义为:起重机置于水平场地时,从其回转平台的回转中心至取物装置(空载时)垂直中心线的水平距离。履带起重机幅度即为回转中心轴线至吊钩的水平距离。在工作状态下,幅度是随着起升重物位置而变化的,其起升力矩也随之变化,起重力矩限制器则限制起升力矩值在安全范围内变化。检规对于起重机幅值参数的要求有幅度和幅度综合误差两个方面。
1)幅度 现场进行变幅运动,检查显示器上是否显示相应位置幅度,显示计量单位是否为m,是否至少保留小数点后两位。
2)幅度综合误差 检查系统综合误差不大于5%,其中流动式起重机另需增加额定载荷下的试验。与幅值检测相关的起重机有流动式起重机、门座起重机及桅杆起重机,在具体检验过程中,第一点为现场定性检验,无需测量;第二点为现场测量,根据标准GB/T 28264—2012《起重机械 安全监控管理系统》中7.2 要求,空载状态下取最大工作幅度的30%、60% 及90%,变幅机构在取点附近小范围内运行两次后停止,分别测定实际幅度R0.3a、R0.6a、R0.9a,3 次并取平均值,同时读取起重机监控系统相应显示幅度R0.3b、R0.6b、R0.9b,3 次并取平均值。按照综合误差公式计算
式中:ER 为幅度综合误差,Ra 为3 次实际幅度算术平均值,Rb 为3 次显示幅度算术平均值。对于流动式起重机还需增加额定载荷状态下的幅度测量。
2 测量方案及参数
2.1 履带起重机参数
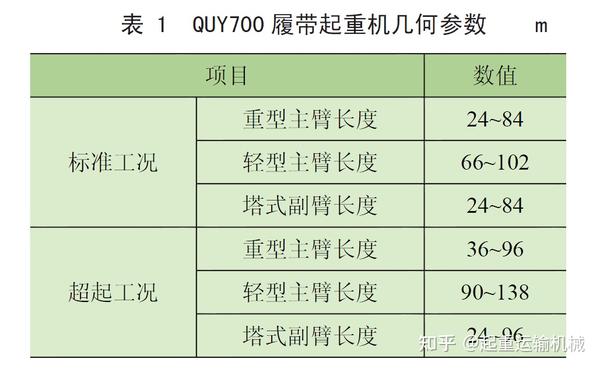
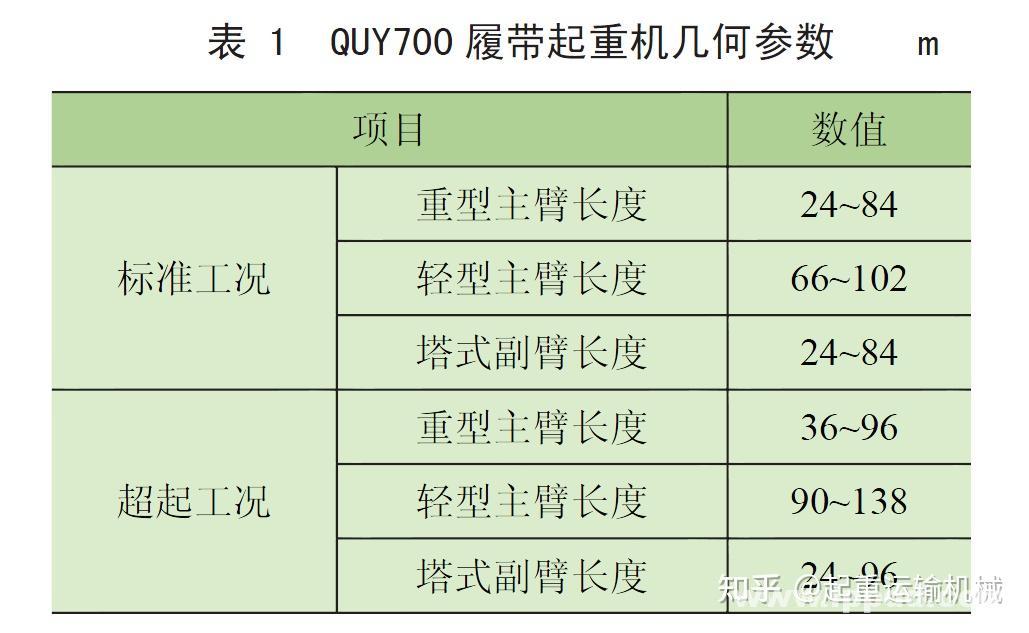
选择QUY700 履带起重机为测试对象,主要几何参数如表1 所示。测试时重型主臂长度为36 m。
2.2 全站仪及软件
测量采用全站仪型号为徕卡TPS1200,角度测量精度可达1′,距离测量误差为1 mm+1.5 ppm(每公里误差为2.5 mm)。为保证观测点坐标系一致,测量中全站仪位置保持不变。
采用Matlab 软件对测量数据的进行处理,利用其矩阵计算、数据拟合及绘图功能编程,实现测量数据分析目标。
3 测量方案
对于大多数履带起重机而言,现场无法直接确定其回转中心,因此需从周边位置用测量相关点坐标,再运用拟合算法换算求出幅度,避免现场关键元素坐标无法直接测量的困难,再利用Matlab 软件分析数据处理函数,进行观测数据平面拟合和解方程运算,从而得到幅度值。
3.1 标记点的选取
如图1 所示,主臂位于起重机正前方并与底盘侧面平行。图2 中在底盘侧面标记4 个点,尽可能使得点1与点3 连线尽可能与回转中心轴线平行。图3 为测量方案示意图,通过底盘侧面4 个点拟合生成平面A,然后过吊钩底端做平面A 的平行面B,点d 是点1 与点3 连线的中点,过d 点的平面A 法线与平面B 交于点c,点11、12 与点11´、12´ 为不同起升高度的相同点,取差值平均得到铅垂向量。因此通过空间解析几何方法可得向量a→c与铅垂向量的夹角α,将ac 水平投影即得幅值R。


图1 QUY700 履带式起重机


图2 底盘侧面4 个标记点
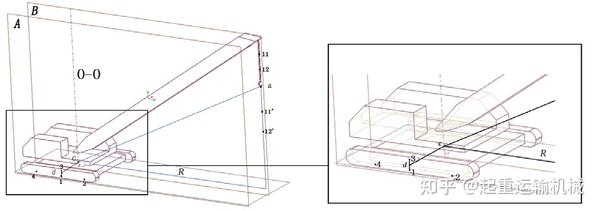
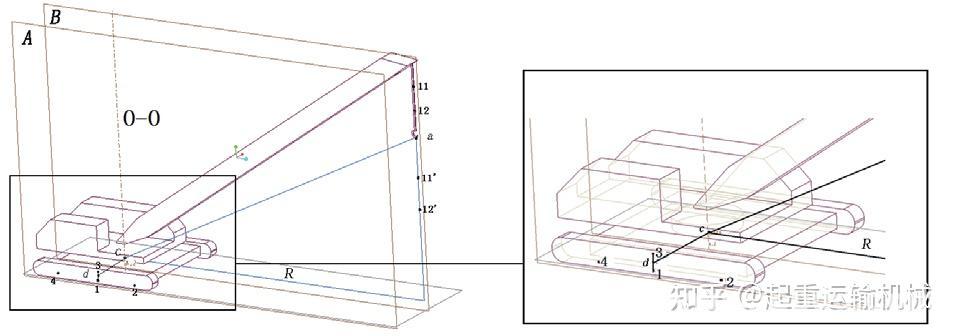
图3 测量方案示意
3.2 现场测量步骤
1) 标记底盘侧面4 个标记点,使得点1 与点3 连线尽可能与回转中心轴线平行,用全站仪测量该标记点;
2) 测量吊钩底部点a 坐标;
3) 在吊钩侧面标记点11 和点12,分别测量起升前及起升后坐标。
4 测量数据处理
4.1 测量数据和平面拟合
标记点测量数据如表2 所示。设平面为


分别为三坐标数据均值,采用最小二乘法拟合平面[9],设定目标函数方程为[6]
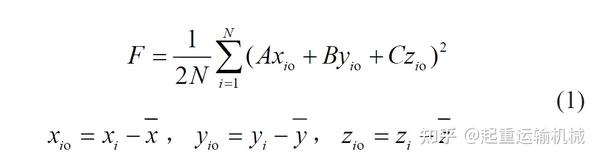
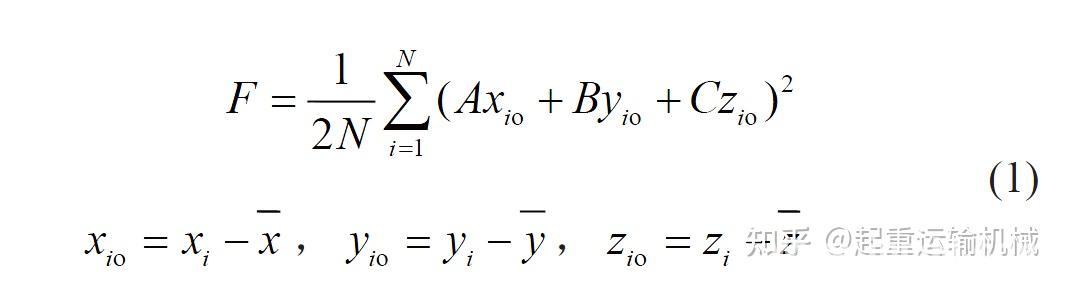
式中:N 为数据长度。
矩阵函数可表示为


对W T 求一阶偏导并取零


将(XX T)进行特征分解,得到特征值矩阵V 和特征向量矩阵V,其最小特征值对应的特征向量为所求拟合平面的系数,即min min min min v = [A B C ]。
通过计算拟合平面A 的方程为0.667 1x+0.4907y+0.560 5z-30.316 1=0,平面如图5 所示。
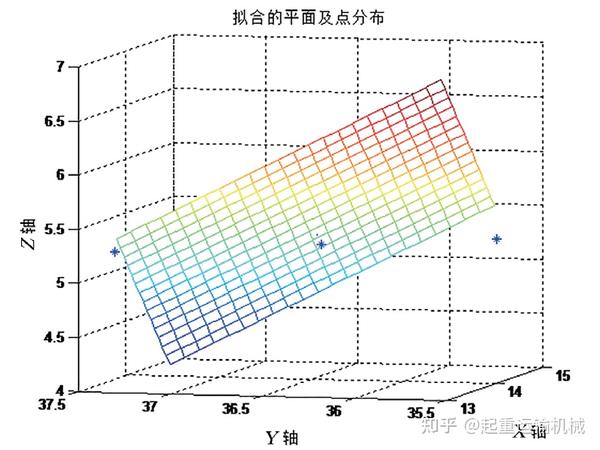

图5 拟合平面及点分布


4.2 空间解析几何求解幅值
过吊钩最低点a 作平行于平面A 的平面B,方程为0.667 1x+0.490 7y+0.560 5z-29.282 6=0。点d 坐标为(14.074 5,36.455 9,5.426 0),故从d 点沿平面A 法向量作直线交平面B 于点c,其计算公式为
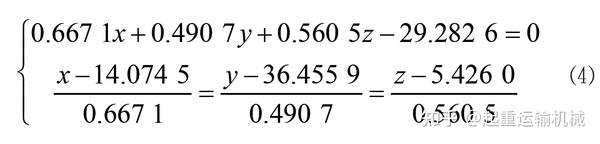



因此,α=34.96º,幅值R=|ac|sina=7.660 9 m。
4.3 结果分析
计算幅值略小于大型监控系统显示值,是由于大型监控系统幅值是根据设定臂长与起升仰角计算而得,未考虑起重臂的自重及受载荷带来的变形等情况。根据此时臂长36 m 仰角80°,回转中心到起重臂铰点距离估计幅值为8 m,与计算幅值偏差不大,对于现场测量而言该计算幅值是可接受的。
5 结论
提出了基于全站仪的履带起重机幅度测量方法,基本解决了现场难以确定回转中心这一难题。方法以起重机底盘侧面为参考平面,通过平面拟合和空间解析几何方法计算幅度,通过与大型监控系统的数据对比及实际臂长仰角估算,本方法计算幅度具有参考意义,可为现场测量提供可靠的依据。
参考文献
[1] Giuseppe Ganci & Mark R.Shortis, Alignment of Crane Rails using a Survey Network[J].Australian Surveyor,1995, 40(4):14-21.
[2] Dennig D,Bureick J,Link J,et al.Comprehensive and Highly Accurate Measurements of Crane Runways[J]. Profiles and Fastenings.Sensors,2017,17(3).
[3] Ghang Lee,Hong-Hyun Kim,Chi-Joo Lee,et al.A laser technology based lifting path tracking system for a robotic tower crane[J].Automation in Construction,2009,18(2):865-874.
[4] 刘伟,肖静文. 一种新型起重机轨道磨损检测方法及误差分析[J]. 机械强度,2014(9):878-883.
[5] TSG Q7015-2016 起重机械定期检验规则[S].
[6] TSG Q7016-2016 起重机械安装改造重大修理监督检验规则[S].
[7] GB/T 28264-2012 起重机械安全监控管理系统[S].
[8] C. Bishop,Pattern recognition and machine learning[M]. Information science and statistics.Springer,2006.
